KU Students Win Honors at International Robotics Conference

University of Kansas School of Engineering students brought home first place awards from the 2008 IEEE International Conference on Robotics and Automation in Pasadena, Calif.
A seven-person team of computer science graduate students, led by KU Chris Gifford and Russell Webb, took part in the ICRA Space Robotics Challenge and won top honors for two tasks associated with the contest.
“The event committee wanted the challenge to be more of a research showcase, but also involve autonomous tasks that future planetary robots may perform,” said Gifford.
Planning for this high-tech test of skills began in October 2007. Gifford and Webb, under the guidance of Associate Professor of Electrical Engineering and Computer Science Arvin Agah, created and led a robotics course that would address many of the open-ended problems found in the challenge.
“Competing against other teams and universities brings out the best in people. It makes it more exciting,” Agah said. Contests such as this also supply students with a more concentrated experience, he said. “Instead of faculty coming up with the problem, the challenge was provided to us, which gave us direction. We focused on a novel solution to the question. It is a big enough challenge that the problem is research oriented.”
Participants, which included other major research universities such as Carnegie-Mellon University, Cornell University and the University of Southern California, had to submit an abstract and video of their project in February and were then selected to participate. The KU team spent the entire spring semester working on a system that could replicate robots gathering data on a distant planet.
“The challenge is composed of three main events, one of which is the Sandbox,” Gifford said prior to the team’s departure. “The Sandbox is a simulated planetary environment populated with a lander and multiple objects of varying shape, size, and color. The objective is to start on the lander, safely descend onto the surface, and perform specific tasks.”
The main challenge the KU team focused on was mapping the features of the 6-meter square sandbox, said Gifford, a doctoral candidate from McPherson who earned both his bachelor’s and master’s degrees in computer science from KU.
“The goal of mapping the environment is to build a metric map as fast and as accurately as possible,” he said. “That is why we chose a multi-robot approach, so each robot could simultaneously map independent portions of the environment and merge their individual maps together for a more complete view.”
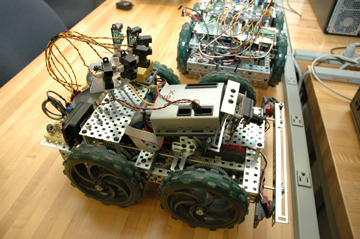
The team’s decision to create a multi-robot system worked in their favor at the event. During the semester, the students built a larger science robot and several smaller explorer robots. When a motor on the larger robot failed shortly before the competition, the team was able to reconfigure the group of smaller robots to complete their tasks without the need for the larger lead robot.
Each of the small robots was equipped with two Sun SPOT devices from Sun Microsystems. One handled communications tasks, the other tracked the positioning of each of the small robots.
“The more information we can gather about our environment to feed in, the better the likelihood we’ll be able to come up with an estimate of where we are,” Webb said. “Getting lost in an unknown environment is bad,” he added.
Funding for the team’s equipment and travel came from the School of Engineering and the Department of Electrical Engineering and Computer Science. The team also chose to take a low-cost approach to its system that proved effective and turned heads.
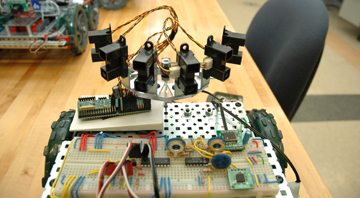
Where most teams in the challenge used laser range finders that can cost $5,000 or more, the KU team created $70 infrared sensor turrets, or IR turrets, that with proper programming can simulate the mapping abilities of a laser range finder. Each turret sported six IR sensors that could be manipulated to provide a 180-degree view.
“Mapping is one of the most complicated tasks that robots can do,” Webb said. “Our approach was to do it on the cheap, and it was successful because we were able to get a pretty good map of the environment from our run. But it certainly wasn’t the most accurate.”
Currently, the graduate students are writing research papers related to their designs, Agah said. And the success of the KU team turned some skeptics into believers.
“The feedback we received about our system was very encouraging," Gifford said. “As we were the only entry employing multiple robots composed of low-cost and limited computing components, our approach was viewed as unconventional. All other teams utilized one robot to do these tasks, which were considerably larger with much more onboard computing power. Our entire system costs less than one of their ranging sensors.”
Students taking part in the 2008 ICRA Space Robotics Challenge:
Bryan Banz,
doctoral student in computer science
James Bley,
master’s student in computer science
Mark Calnon,
master’s student in computer science
Chris Gifford,
doctoral candidate in computer science
Daniel Leung,
doctoral student in computer science
Joseph Makarewicz,
doctoral student in electrical engineering
Russell Webb,
master’s student in computer science